The Send and Receive constructs will be supported as follows.
Every Process will communicate through channels or signals. These Channels or signals are identified by the signal or channel identifiers which are defined in the system scope. Signals are defined as follows:
SIGNAL <List of Comma Separated Signal Identifiers>;
Where SIGNAL is the keyword.
The process will communicate through SEND/RECEIVE primitives which are defined as follows. We will assume that the processes will send/receive one-byte through the Channels.
For example a SEND primitve will look like:
SEND(sig_id,'a') or SEND(sig_id,v)
where sig_id signifies the signal/channel it is going to use. 'a' is a byte – constant which is sent through the pipe. v is a character variable declared as char v; in the process space.
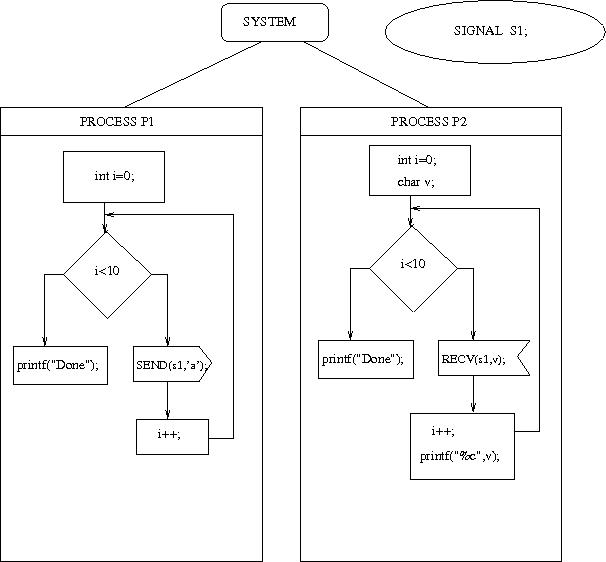
An Example:
Here the equivalent description is as follows:
SYSTEM mystem1;
SIGNAL S1;
PROCESS P1,P2;
PROCESSDEF P1
START
BLOCK blockid1 BEGIN
START
int i=0;
GOTO mydec1
END
DECISION mydec1
IF i<10
THEN
GOTO comid1
ELSE
GOTO blockid2
BLOCK blockid2 BEGIN
START
printf(“Done”);
END
BLOCK blockid3 BEGIN
START
i++;
GOTO mydec1
END
COMM comid1
SEND(S1,'a');
GOTO blockid3
END
PROCESSDEF P2
START
BLOCK blockid4 BEGIN
START
int i=0;
char v;
GOTO mydec2
END
DECISION mydec2
IF i<10
THEN
GOTO comid2
ELSE
GOTO blockid4
BLOCK blockid4 BEGIN
START
printf(“Done”);
END
BLOCK blockid5 BEGIN
START
i++;
printf(“%c”,v);
GOTO mydec2
END
COMM comid2
RECV(S1,v);
GOTO blockid5
END
A communication block is specified as follows:
A SEND block looks like:
COMM Commblock_Identifier
SEND(signal_identifier,Character_Constant_or_Variable);
GOTO Next_Control_Flow_Node_Identifier
A Recv block looks like:
COMM Commblock_Identifier
SEND(signal_identifier,Character_Variable);
GOTO Next_Control_Flow_Node_Identifier
- Hint for code Generation
main( )
{
//Signal – Name
//Mnamed Pipes etc to be defined here
for(i=0;i<number_of_defined_process;i++){
if(fork( ) == 0){
//Call the function to be executed for the process
}else break;
}
}
You may have to use sleep function for some sort of synchroization.